|
GranOO
3.0
A robust and versatile workbench to build 3D dynamic simulations based on the Discrete Element Method
|
|
GranOO
3.0
A robust and versatile workbench to build 3D dynamic simulations based on the Discrete Element Method
|
A class for managing contact with discrete elements (obsolete and not documented) More...
#include <ContactLaw.hpp>
Public Member Functions | |
| virtual void | parse_xml ()=0 |
| virtual void | init () |
| virtual void | info (std::ostream &) const |
| virtual void | compute_reaction (DEM::DiscreteElement &de1, T &de2, const Geom::Vector &normal, const double &penetration)=0 |
| virtual void | pre_contact_detection () |
| virtual void | post_contact_detection () |
| void | manage_collision (DEM::DiscreteElement &, T &, const Collision::Data &) |
 Public Member Functions inherited from GranOO3::Collision::CallBack< DEM::DiscreteElement, T > Public Member Functions inherited from GranOO3::Collision::CallBack< DEM::DiscreteElement, T > | |
| virtual double | compute_critical_time_step () const=0 |
| a pure virtual method able to return the critical time step value More... | |
Static Public Member Functions | |
| static std::string | class_ID () |
| Static Public Member Functions inherited from GranOO3::Collision::CallBack< DEM::DiscreteElement, T > | |
| static std::string | class_ID () |
| Static Public Member Functions inherited from GranOO3::Physic::CriticalTimeStep | |
| static const std::set< CriticalTimeStep * > & | get_all () |
Protected Member Functions | |
| ContactLaw () | |
| virtual | ~ContactLaw () |
| Protected Member Functions inherited from GranOO3::Collision::CallBack< DEM::DiscreteElement, T > | |
| CallBack () | |
| virtual | ~CallBack () |
| Protected Member Functions inherited from GranOO3::Physic::CriticalTimeStep | |
| CriticalTimeStep () | |
| constructor More... | |
| virtual | ~CriticalTimeStep () |
| destructor More... | |
Private Member Functions | |
| ContactLaw (const ContactLaw &)=delete | |
| ContactLaw & | operator= (const ContactLaw &)=delete |
Additional Inherited Members | |
| Public Types inherited from GranOO3::Collision::CallBack< DEM::DiscreteElement, T > | |
| typedef Manager< DEM::DiscreteElement, T > | Man |
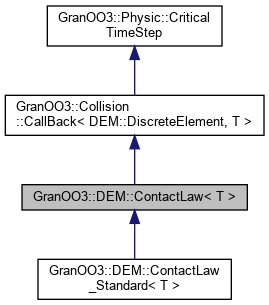
A class for managing contact with discrete elements (obsolete and not documented)
This way for managing contact is obsolete, please use GranOO::Collision library instead. ContactLaw is just provided for convenience and retro-compatibility (in particular, for the granoo-cooker).
|
protected |
|
protectedvirtual |
|
privatedelete |
|
inlinestatic |
|
pure virtual |
Implemented in GranOO3::DEM::ContactLaw_Standard< T >.
|
virtual |
Reimplemented in GranOO3::DEM::ContactLaw_Standard< T >.
|
virtual |
Reimplemented from GranOO3::Collision::CallBack< DEM::DiscreteElement, T >.
|
inlinevirtual |
|
privatedelete |
|
pure virtual |
Reimplemented from GranOO3::Collision::CallBack< DEM::DiscreteElement, T >.
Implemented in GranOO3::DEM::ContactLaw_Standard< T >.
|
virtual |
|
virtual |