|
GranOO
3.0
A robust and versatile workbench to build 3D dynamic simulations based on the Discrete Element Method
|
|
GranOO
3.0
A robust and versatile workbench to build 3D dynamic simulations based on the Discrete Element Method
|
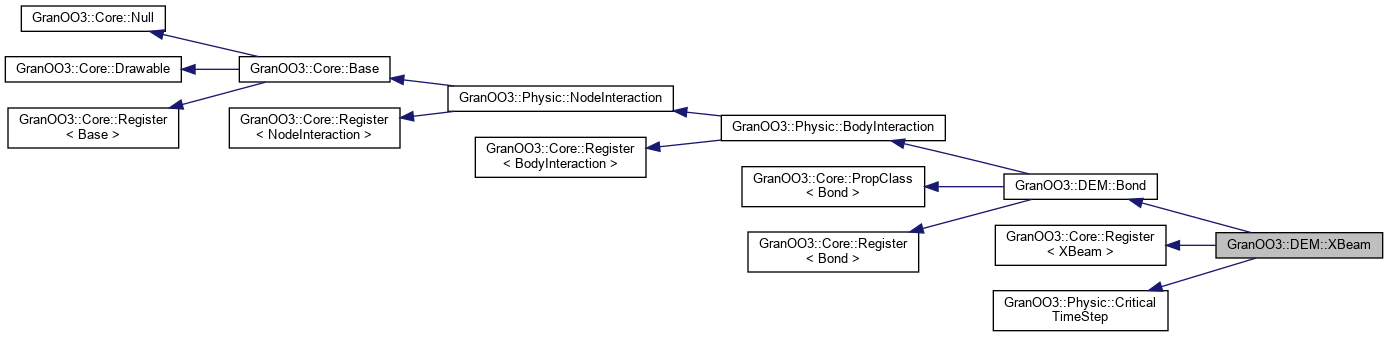
A bond XBeam that works in tension, compression, bending and torsion very similar to the Beam bond. More...
#include <XBeam.hpp>
Public Member Functions | |
| XBeam (Element &el1, Element &el2) | |
| constructor More... | |
| XBeam (Element &el1, Element &el2, double young_mod, double radius, double poisson_ratio, double max_stress=0.) | |
| constructor More... | |
| XBeam (Element &el1, Element &el2, double young_mod, double damping, double radius, double poisson_ratio, double max_stress, bool nl_geom=false) | |
| constructor More... | |
| virtual | ~XBeam () |
| virtual void | compute_load () |
| Compute the reaction force and torque of the beam. More... | |
| virtual double | compute_critical_time_step () const |
| compute the critical time of the bond More... | |
| virtual void | stiffness_matrix (Eigen::MatrixXd &kMatrix) |
Assigns the global stiffness matrix of the XBeam kMatrix. More... | |
| virtual void | update_dof () |
| Builds the list of global Degrees Of Freedom (DOFs), required by the solver to assemble the global (system-level) stiffness matrix and the displacement and forces vectors. More... | |
| virtual std::string | info () const |
| Displays some useful info in the terminal. More... | |
| virtual void | draw () |
| OpenGL draw of the bond More... | |
 Public Member Functions inherited from GranOO3::DEM::Bond Public Member Functions inherited from GranOO3::DEM::Bond | |
| Bond (Element &el1, Element &el2, bool contact=false) | |
| Constructor. More... | |
| virtual | ~Bond ()=0 |
| Destructor. More... | |
| Element & | get_item1 () |
| const Element & | get_item1 () const |
| Element & | get_item2 () |
| const Element & | get_item2 () const |
| Element & | item1 () |
| Element & | item2 () |
| double | get_normal_force_intensity () const |
| double | get_tangential_force_intensity () const |
| Element & | bonded_element (const Element &) |
| get the bonded element More... | |
| const Element & | get_bonded_element (const Element &) const |
| same as bonded_element(const Element&) (provided for convenience) More... | |
| virtual double | get_linear_stiffness () const |
| compute the linear stiffness of the bond More... | |
| virtual double | get_angular_stiffness () const |
| similar as get_linear_stiffness() for rotation More... | |
| void | apply_linear_damping_factor () |
| compute and apply the linear (translation) damping factor of the bond More... | |
| void | apply_angular_damping_factor () |
| similar as apply_linear_damping_factor() for rotation More... | |
| void | apply_load () |
| apply the computed reaction force and torque to the bonded Element (_element1 and _element2) More... | |
| void | disable (bool manage_slave=true) |
| disable the bond More... | |
| void | disable_fast_mode (bool manage_slave=true) |
| simply disable the bond by switching the _disabled attribute to true without doing the lot of things done by the disable() method More... | |
| void | enable (bool manage_slave=true) |
| simply enable the bond by switching the _disabled attribute to false More... | |
| bool | is_disabled () const |
| check if the bond is enable or not More... | |
| void | crack (bool manage_slave=true) |
| void | uncrack (bool manage_slave=true) |
| bool | is_cracked () const |
| void | init_local_frame (bool update_initial_param=false) |
| initialize the bond local frame More... | |
| void | update_local_frame () |
| update the bond local frame More... | |
| void | update_current_length () |
| update the current value of the bond length (see _current_length attribute) More... | |
| void | build_voronoi_bond () |
| build a voronoi bond from the current bond More... | |
| const std::vector< unsigned int > & | get_dof () const |
| get the dof vector More... | |
| const Geom::Point & | initial_pos (const Element &) const |
get the initial position of the el element More... | |
| Geom::Vector | get_disp (const Element &) const |
get the displacement of the el element More... | |
| Geom::Vector | get_disp1 () const |
| get the displacement of the first bonded element (_element1) More... | |
| Geom::Vector | get_disp2 () const |
| similar as get_disp1() More... | |
| void | swap (Element &from, Element &to) |
swap the bond from the Element from to to More... | |
| void | add_slave (Bond &b) |
| add a slave bond (useful for periodic simulation) More... | |
| virtual std::ostream & | export_to_povray (std::ostream &out) const |
| exporting to povray format More... | |
| Public Member Functions inherited from GranOO3::Physic::BodyInteraction | |
| BodyInteraction (Body &b1, Body &b2, bool contact_interaction) | |
| constructor More... | |
| virtual | ~BodyInteraction () |
| destructor More... | |
| void | apply_torque () |
| apply the current torque value More... | |
| void | clear_torque () |
| set the torques to zero More... | |
| Geom::Vector & | torque_on (const Body &b) |
get the torque value applied on b More... | |
| const Geom::Vector & | torque_on (const Body &b) const |
| same as BodyInteraction::torque_on More... | |
| void | add_label_torque (const std::string &label, const Geom::Vector &t1, const Geom::Vector &t2) |
| add a label for the torque More... | |
| void | swap (Body &from, Body &to) |
| swap one body More... | |
| Public Member Functions inherited from GranOO3::Physic::NodeInteraction | |
| NodeInteraction (Node &de1, Node &de2, bool build_node_interaction) | |
| virtual | ~NodeInteraction () |
| bool | contact_interaction () const |
| void | apply_force () |
| void | clear_force () |
| Geom::Vector & | force_on (const Node &) |
| const Geom::Vector & | force_on (const Node &) const |
| void | swap (Node &from, Node &to) |
| virtual std::ostream & | write_ascii (std::ostream &out) const |
| void | add_label_force (const std::string &label, const Geom::Vector &f1, const Geom::Vector &f2) |
| Public Member Functions inherited from GranOO3::Core::Base | |
| virtual | ~Base () |
| size_t | numID () const |
| size_t | uID () const |
| void | set_numID (size_t val) |
| void | clear_numID () |
| Physic::Material & | get_mat () const |
| void | set_mat (Physic::Material *) |
| Base & | item () |
| const Base & | item () const |
| bool | is_same (const Base &) const |
| template<class T > | |
| T & | cast_to () |
| template<class T > | |
| const T & | cast_to () const |
| template<class T > | |
| bool | is () const |
| virtual bool | is (size_t) const |
| virtual const std::string & | get_ID () const |
| virtual Base & | clone () |
| template<class T > | |
| T & | clone_to () |
| virtual std::istream & | read_ascii (std::istream &in) |
| Signal< Base & > & | deleted_signal () |
| Public Member Functions inherited from GranOO3::Core::Null | |
| Null () | |
| virtual | ~Null () |
| Public Member Functions inherited from GranOO3::Core::Drawable | |
| Drawable () | |
| virtual | ~Drawable () |
| virtual void | draw_edge () |
| virtual void | init_default_color () |
| virtual std::ostream & | get_info (std::ostream &os) const |
| virtual const Color & | default_color () const |
| Color & | get_color () |
| const Color & | get_color () const |
| virtual void | set_color (const Color &) |
| virtual void | set_alpha (float alpha) |
| void | apply_color () const |
| void | apply_edge_color () const |
| void | apply_default_color () |
| void | apply_selected_color () |
| void | set_line_width (float) |
| float | get_line_width () const |
| float & | get_line_width () |
| void | apply_line_width () const |
| bool | is_visible () const |
| void | set_visible (bool) |
| void | paint () |
| void | paint_edge () |
| unsigned int | get_item_glkey () const |
| Public Member Functions inherited from GranOO3::Core::Register< Base > | |
| Register () | |
| virtual | ~Register () |
| void | erase_from_all_setof () |
| bool | belong_to_setof (const std::string &setOfId) const |
| bool | belong_to_setof (const SetOf< Base > &set) const |
| std::list< SetOf< Base > * > & | get_setof_list () |
| unsigned long long int | get_numeric_ID () const |
| Public Member Functions inherited from GranOO3::Core::Register< NodeInteraction > | |
| Register () | |
| virtual | ~Register () |
| void | erase_from_all_setof () |
| bool | belong_to_setof (const std::string &setOfId) const |
| bool | belong_to_setof (const SetOf< NodeInteraction > &set) const |
| std::list< SetOf< NodeInteraction > * > & | get_setof_list () |
| unsigned long long int | get_numeric_ID () const |
| Public Member Functions inherited from GranOO3::Core::Register< BodyInteraction > | |
| Register () | |
| virtual | ~Register () |
| void | erase_from_all_setof () |
| bool | belong_to_setof (const std::string &setOfId) const |
| bool | belong_to_setof (const SetOf< BodyInteraction > &set) const |
| std::list< SetOf< BodyInteraction > * > & | get_setof_list () |
| unsigned long long int | get_numeric_ID () const |
| Public Member Functions inherited from GranOO3::Core::PropClass< Bond > | |
| PropClass () | |
| virtual | ~PropClass () |
| T & | new_object () |
| T & | get () |
| const T & | get () const |
| bool | prop_exist () const |
| void | add_prop (Core::Prop< Bond > *) |
| void | remove_prop (Core::Prop< Bond > *) |
| std::string | info () const |
| Public Member Functions inherited from GranOO3::Core::Register< Bond > | |
| Register () | |
| virtual | ~Register () |
| void | erase_from_all_setof () |
| bool | belong_to_setof (const std::string &setOfId) const |
| bool | belong_to_setof (const SetOf< Bond > &set) const |
| std::list< SetOf< Bond > * > & | get_setof_list () |
| unsigned long long int | get_numeric_ID () const |
| Public Member Functions inherited from GranOO3::Core::Register< XBeam > | |
| Register () | |
| virtual | ~Register () |
| void | erase_from_all_setof () |
| bool | belong_to_setof (const std::string &setOfId) const |
| bool | belong_to_setof (const SetOf< XBeam > &set) const |
| std::list< SetOf< XBeam > * > & | get_setof_list () |
| unsigned long long int | get_numeric_ID () const |
Protected Attributes | |
| double | _young_modulus |
| The Young's modulus value of the beam in [Pa]. More... | |
| double | _damping_factor |
| The damping factor of the beam expressed as a ratio of the critical damping. More... | |
| double | _radius |
| The radius of the beam in [m]. More... | |
| double | _poisson_ratio |
| The Poisson's ratio of the beam in [-]. More... | |
| double | _max_stress |
| The maximal tensile stress of the beam in [Pa]. More... | |
| double | _current_stress |
| The current maximal stress (including normal, bending and torsion stresses) in [Pa]. More... | |
| double | _current_tensile_stress |
| The current tensile stress into the beam. More... | |
| double | _current_bending_stress |
| The current maximal bending stress into the beam. More... | |
| double | _current_torsion_stress |
| The current maximal torsion stress into the beam. More... | |
| double | _current_normal_stress |
| The current maximal normal stress into the beam (sum of tensile and bending stresses) More... | |
| double | _tensile_energy |
| double | _shear_energy |
| double | _torsion_energy |
| double | _bending_energy |
| double | _Ig |
| For storing some intermediate values to speed-up the computation (quadratic inertia) More... | |
| double | _Io |
| For storing some intermediate values to speed-up the computation (quadratic polar inertia) More... | |
| double | _G |
| For storing some intermediate values to speed-up the computation (Coulomb's modulus) More... | |
| double | _S |
| For storing some intermediate values to speed-up the computation (normal surface) More... | |
| double | _K |
| For storing some intermediate values to speed-up the computation (normal stiffness) More... | |
| Protected Attributes inherited from GranOO3::DEM::Bond | |
| Element * | _element1 |
| the first of the two bonded Element More... | |
| Element * | _element2 |
| the second of the two bonded Element More... | |
| double | _linear_damping_factor |
| the linear damping factor of the bond More... | |
| double | _angular_damping_factor |
| the angular damping factor of the bond More... | |
| double | _relaxed_length |
| the relaxed length of the bond. More... | |
| double | _current_length |
| the current length of the bond that correspond to the norm of the vector between the center of the bonded elements More... | |
| double | _max_relative_elongation |
| a threshold corresponding to a maximal admissible relative elongation (the longitudinal strain) More... | |
| double | _surface |
| this attribute stores the corresponding normal surface of the bond More... | |
| Core::SetOfBase< Bond > | _slave |
| a container that list the slave bond More... | |
| std::vector< unsigned int > | _dofs |
| a vector that stores the dof of the bond More... | |
| Protected Attributes inherited from GranOO3::Physic::BodyInteraction | |
| Body * | _body1 |
| a pointer the first body More... | |
| Body * | _body2 |
| a pointer the second body More... | |
| Geom::Vector | _torque_on1 |
| the current value of the applied torque on the body 1 More... | |
| Geom::Vector | _torque_on2 |
| the current value of the applied torque on the body 2 More... | |
| Protected Attributes inherited from GranOO3::Physic::NodeInteraction | |
| const bool | _contact_interaction |
| Node * | _node1 |
| Node * | _node2 |
| Geom::Vector | _force_on1 |
| Geom::Vector | _force_on2 |
| Protected Attributes inherited from GranOO3::Core::PropClass< Bond > | |
| std::vector< Core::Prop< Bond > * > | _prop |
Private Member Functions | |
| void | update () |
| Updates the beam's current configuration. This is required in case of large transformations, because the beam's current frame may have bee rotated since the previous configuration. More... | |
| void | build_transformation_matrix () |
| Builds the rotation matrix used to rotate the beam's local stiffness matrix (expressed along the x-axis) to its initial frame (the one usually defined by domain construction). More... | |
| void | build_local_stiffness_matrix () |
| Builds the beam's local stiffness matrix (expressed along the x-axis). More... | |
| void | on_matrix_from_xdir (const Geom::Vector &xDir, const Geom::Vector &yDir, Eigen::Matrix3d &rotMatrix) const |
| Builds an orthonormal matrix given two vectors, x- and y-oriented. More... | |
| void | rot_matrix_to_quaternion (const Eigen::Matrix3d &rotMatrix, Geom::Quaternion &quaternion) const |
| Builds a quaternion from a rotation matrix. More... | |
| void | quaternion_to_rot_matrix (const Geom::Quaternion &quaternion, Eigen::Matrix3d &rotMatrix) const |
| Builds a rotation matrix from a quaternion. More... | |
| XBeam ()=delete | |
| XBeam (const XBeam &frame)=delete | |
| XBeam & | operator= (const XBeam &)=delete |
| template<class Archive > | |
| void | save (Archive &, const unsigned int) const |
| complete serializing of the bond in the *.gdd format More... | |
| template<class Archive > | |
| void | load (Archive &, const unsigned int) |
| Complete serializing of the bond in the *.gdd format. More... | |
| BOOST_SERIALIZATION_SPLIT_MEMBER () | |
Private Attributes | |
| bool | _nl_geom |
| Defines whether non linear geometric effects should be accounted for, i.e. finite rotations. More... | |
| Geom::Vector | _xAxis |
| The current x-axis of thje XBeam, define as the direction between both ends of the beam. More... | |
| double | _ldFactor |
| The linear damping factor, precomputed at the initialization of the XBeam. More... | |
| double | _adFactor |
| The angular damping factor, precomputed at the initialization of the XBeam. More... | |
| Geom::Quaternion | _qbeam_ref_rot |
| The beam's reference (or initial) rotation quaternion. More... | |
| Geom::Quaternion | _qbeam_abs_rot |
| The beam's absolute (or current) rotation quaternion. More... | |
| Geom::Quaternion | _qel1_ref_rot |
| The node 1 reference (or initial) rotation quaternion. More... | |
| Geom::Quaternion | _qel2_ref_rot |
| The node 2 reference (or initial) rotation quaternion. More... | |
| Eigen::MatrixXd | _local_kmat |
| The local stiffness matrix, defined in the x-direction. More... | |
| Eigen::MatrixXd | _tmat |
| The transformation (rotation) matrix, used to express the beam's stiffness matrix in its current frame. More... | |
| Eigen::MatrixXd | _global_kmat |
| The beam's stiffness matrix in its current frame. More... | |
| Eigen::VectorXd | _reaction |
| The reaction (or internal) forces vector, updated at each time increment, at the XBeam level. More... | |
| Eigen::Matrix3d | _mbeam_abs_rot |
| The beam's absolute (or current) rotation matrix. More... | |
| Eigen::Matrix3d | _mbeam_ref_rot |
| The beam's reference (or initial) rotation matrix. More... | |
Friends | |
| class | boost::serialization::access |
Additional Inherited Members | |
| Public Types inherited from GranOO3::DEM::Bond | |
| enum | FailureMode { NONE =0 , TENSION =1 , COMPRESSION =2 , SHEAR =3 } |
| enum | DrawMode { SOLID , LINE , NO } |
| Static Public Member Functions inherited from GranOO3::DEM::Bond | |
| static double | get_disabled_cumulative_surface () |
| get the total surface disabled surface More... | |
| Static Public Member Functions inherited from GranOO3::Core::Base | |
| static Base & | get_by_numID (size_t) |
| static void | clear_all_numID () |
| static unsigned int | get_sub_class_number () |
| Static Public Member Functions inherited from GranOO3::Core::Drawable | |
| static Drawable & | get_drawable_item_by_glkey (int) |
| static void | set_draw_precision (unsigned int p) |
| static void | increase_draw_precision () |
| static void | decrease_draw_precision () |
| static unsigned int | get_draw_precision () |
| Static Public Member Functions inherited from GranOO3::Physic::CriticalTimeStep | |
| static const std::set< CriticalTimeStep * > & | get_all () |
| Static Public Attributes inherited from GranOO3::DEM::Bond | |
| static double | epsilon |
| a very small value used as a threshold More... | |
| static double | draw_solid_factor |
| static DrawMode | draw_mode = LINE |
| static Core::Signal< Bond & > | disable_signal = Core::Signal<Bond&>() |
| get the signal when a bond is disabled More... | |
| Static Public Attributes inherited from GranOO3::Core::Null | |
| static Null | null = Null() |
| Protected Member Functions inherited from GranOO3::DEM::Bond | |
| template<class Archive > | |
| void | save (Archive &, const unsigned int) const |
| template<class Archive > | |
| void | load (Archive &, const unsigned int) |
| BOOST_SERIALIZATION_SPLIT_MEMBER () | |
| Protected Member Functions inherited from GranOO3::Core::Base | |
| Base () | |
| Protected Member Functions inherited from GranOO3::Physic::CriticalTimeStep | |
| CriticalTimeStep () | |
| constructor More... | |
| virtual | ~CriticalTimeStep () |
| destructor More... | |
| Static Protected Member Functions inherited from GranOO3::Core::Base | |
| static unsigned int | affect_class_rank_ID () |
A bond XBeam that works in tension, compression, bending and torsion very similar to the Beam bond.
The difference between Beam and XBeam is that XBeam uses a FEM formulation. So, XBeam can be used in FEM problem and it could advantageous speed-up a lattice calculation in comparison with the standard Beam.
| GranOO3::DEM::XBeam::XBeam | ( | Element & | el1, |
| Element & | el2, | ||
| double | young_mod, | ||
| double | radius, | ||
| double | poisson_ratio, | ||
| double | max_stress = 0. |
||
| ) |
constructor
| [in] | el1 | : the first bonded element |
| [in] | el2 | : the second bonded element |
| [in] | young_mod | : the Young's modulus of the beam in [Pa] |
| [in] | radius | : the radius of the beam in [m] |
| [in] | poisson_ratio | : the Poisson's ratio value of the beam |
| [in] | max_stress | : the maximal stress threshold of the beam in [Pa] (note that zero means infinite strength) |
Build sa new XBeam between the Element el1 and el2 with the required mechanical attributes. In case of continuum modeling, note that the max_stress is not the best way for managing fracture. You may prefer to use the stress computation (see the ApplyFracture PlugIn) which gives more accurate results.
| GranOO3::DEM::XBeam::XBeam | ( | Element & | el1, |
| Element & | el2, | ||
| double | young_mod, | ||
| double | damping, | ||
| double | radius, | ||
| double | poisson_ratio, | ||
| double | max_stress, | ||
| bool | nl_geom = false |
||
| ) |
constructor
| [in] | el1 | : the first bonded element |
| [in] | el2 | : the second bonded element |
| [in] | young_mod | : the Young's modulus of the beam in [Pa] |
| [in] | damping | : the damping factor (in the [0,1] range) which is expressed as the ratio of the critical damping |
| [in] | radius | : the radius of the beam in [m] |
| [in] | poisson_ratio | : the Poisson's ratio value of the beam |
| [in] | max_stress | : the maximal stress threshold of the beam in [Pa] (note that zero means infinite strength) |
| [in] | nl_geom | : a flag to speed-up the computation (for simulation with small strain, displacement and rotation) |
Builds a new XBeam between the Element el1 and el2 with the required mechanical attributes. In case of continuum modeling, note that the max_stress is not the best way for managing fracture. You may prefer to use the stress computation (see the ApplyFracture PlugIn) which gives more accurate results. You can set the nl_geom flag to true if you know that your simulation will handle only small deformation, displacement and rotation. In such a case, passing true to the nl_geom flag can speed-up the computation.
|
virtual |
|
privatedelete |
|
privatedelete |
|
private |
|
private |
Builds the beam's local stiffness matrix (expressed along the x-axis).
|
private |
Builds the rotation matrix used to rotate the beam's local stiffness matrix (expressed along the x-axis) to its initial frame (the one usually defined by domain construction).
|
virtual |
compute the critical time of the bond
Note that this method computes on-the-fly the critical time step.
Implements GranOO3::Physic::CriticalTimeStep.
|
virtual |
Compute the reaction force and torque of the beam.
Reimplemented from GranOO3::DEM::Bond.
|
inlinevirtual |
OpenGL draw of the bond
This method is used for drawing the bond. It is used by the granoo-viewer vizualization tool.
Reimplemented from GranOO3::DEM::Bond.
|
virtual |
Displays some useful info in the terminal.
Reimplemented from GranOO3::DEM::Bond.
|
private |
|
private |
Builds an orthonormal matrix given two vectors, x- and y-oriented.
| [in] | xDir | : A const reference to a Geom::Vector object, defining the x-direction. |
| [in] | yDir | : A const reference to a Geom::Vector object, defining the y-direction. |
| [out] | rotMatrix | : The orthonormal matrix, built from the x- and y-oriented vectors. |
|
private |
Builds a rotation matrix from a quaternion.
| [in] | quaternion | : A const reference to a Geom::Quaterion. |
| [out] | rotMatrix | : The resulting rotation matrix. |
|
private |
Builds a quaternion from a rotation matrix.
| [in] | rotMatrix | : A const reference to an Eigen::Matrix3d rotation matrix. |
| [out] | quaternion | : The resulting quaternion. |
|
private |
|
virtual |
Assigns the global stiffness matrix of the XBeam kMatrix.
| [in,out] | kMatrix | : the stiffness to be updated. |
Reimplemented from GranOO3::DEM::Bond.
|
private |
Updates the beam's current configuration. This is required in case of large transformations, because the beam's current frame may have bee rotated since the previous configuration.
|
virtual |
Builds the list of global Degrees Of Freedom (DOFs), required by the solver to assemble the global (system-level) stiffness matrix and the displacement and forces vectors.
Reimplemented from GranOO3::DEM::Bond.
|
friend |
|
private |
The angular damping factor, precomputed at the initialization of the XBeam.
|
protected |
|
protected |
The current maximal bending stress into the beam.
|
protected |
The current maximal normal stress into the beam (sum of tensile and bending stresses)
|
protected |
The current maximal stress (including normal, bending and torsion stresses) in [Pa].
Note that the _max_stress threshold uses this value as computational reference for determining the maximal strength.
|
protected |
The current tensile stress into the beam.
|
protected |
The current maximal torsion stress into the beam.
|
protected |
The damping factor of the beam expressed as a ratio of the critical damping.
|
protected |
For storing some intermediate values to speed-up the computation (Coulomb's modulus)
|
private |
The beam's stiffness matrix in its current frame.
|
protected |
For storing some intermediate values to speed-up the computation (quadratic inertia)
|
protected |
For storing some intermediate values to speed-up the computation (quadratic polar inertia)
|
protected |
For storing some intermediate values to speed-up the computation (normal stiffness)
|
private |
The linear damping factor, precomputed at the initialization of the XBeam.
|
private |
The local stiffness matrix, defined in the x-direction.
|
protected |
The maximal tensile stress of the beam in [Pa].
|
private |
The beam's absolute (or current) rotation matrix.
|
private |
The beam's reference (or initial) rotation matrix.
|
private |
Defines whether non linear geometric effects should be accounted for, i.e. finite rotations.
|
protected |
The Poisson's ratio of the beam in [-].
|
private |
The beam's absolute (or current) rotation quaternion.
|
private |
The beam's reference (or initial) rotation quaternion.
|
private |
The node 1 reference (or initial) rotation quaternion.
|
private |
The node 2 reference (or initial) rotation quaternion.
|
protected |
The radius of the beam in [m].
|
private |
The reaction (or internal) forces vector, updated at each time increment, at the XBeam level.
|
protected |
For storing some intermediate values to speed-up the computation (normal surface)
|
protected |
|
protected |
|
private |
The transformation (rotation) matrix, used to express the beam's stiffness matrix in its current frame.
|
protected |
|
private |
The current x-axis of thje XBeam, define as the direction between both ends of the beam.
|
protected |
The Young's modulus value of the beam in [Pa].